Sub-Assembly Fabrication for the Robot
3D Printing & Orientations
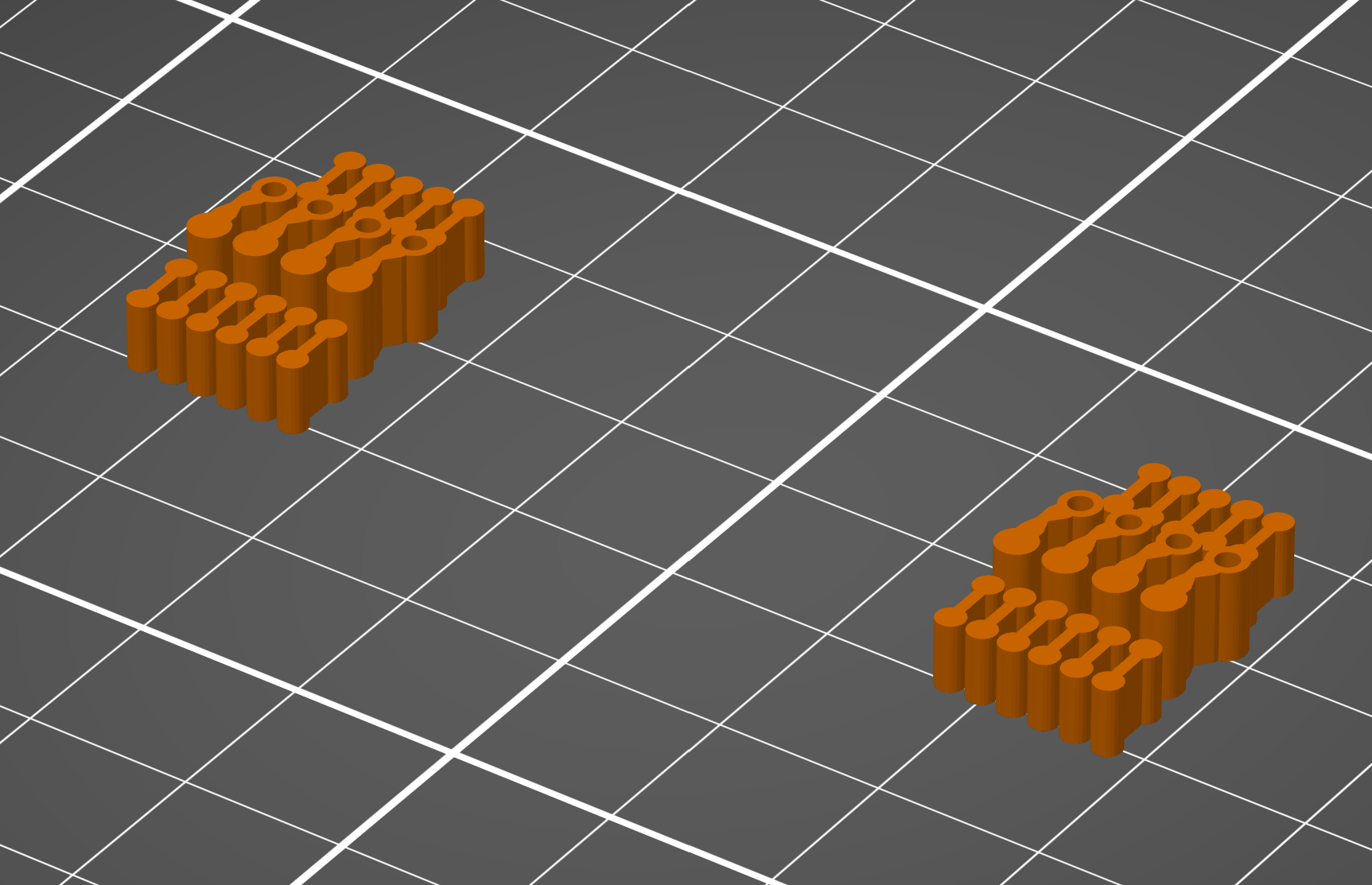
If using Prusa i3 printers with Prusa Slicer, all parts should be printed at 0.3mm resolution (“draft quality” on Prusa Slicer), with 15% gyroid infill, and organic supports enabled (where necessary), except for the chest piece, which should be printed at 0.2mm resolution, with 15% gyroid infill, and normal grid-style supports instead. Alternatively, the finger hinges should be printed using PETG filament with 0% gyroid infill and a brim.
The hands used for this robot have been sized down by 42.5% with minimal changes to the bolt holes from the original prosthetic model, but the mechanism funtionality remains the same.
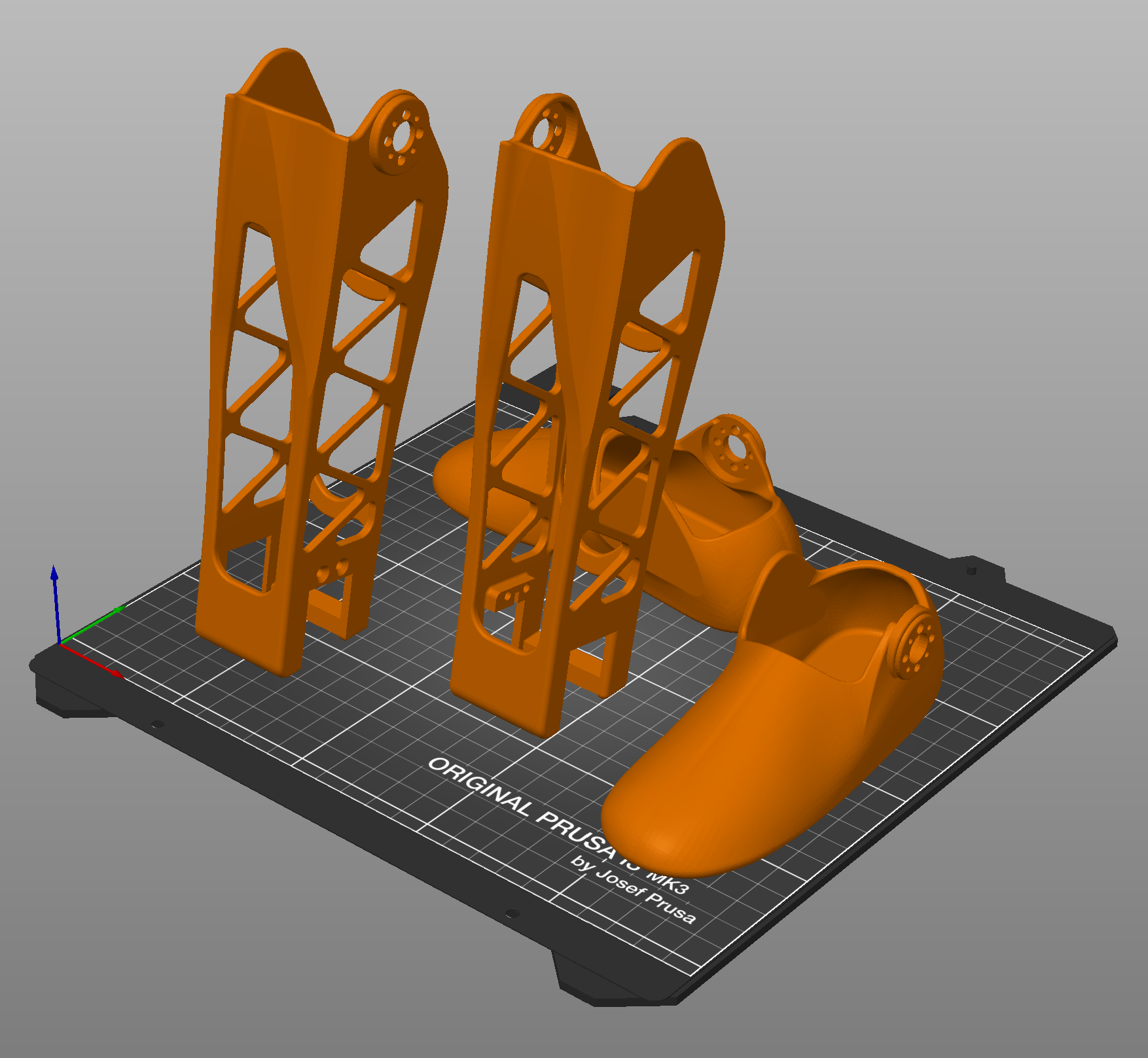
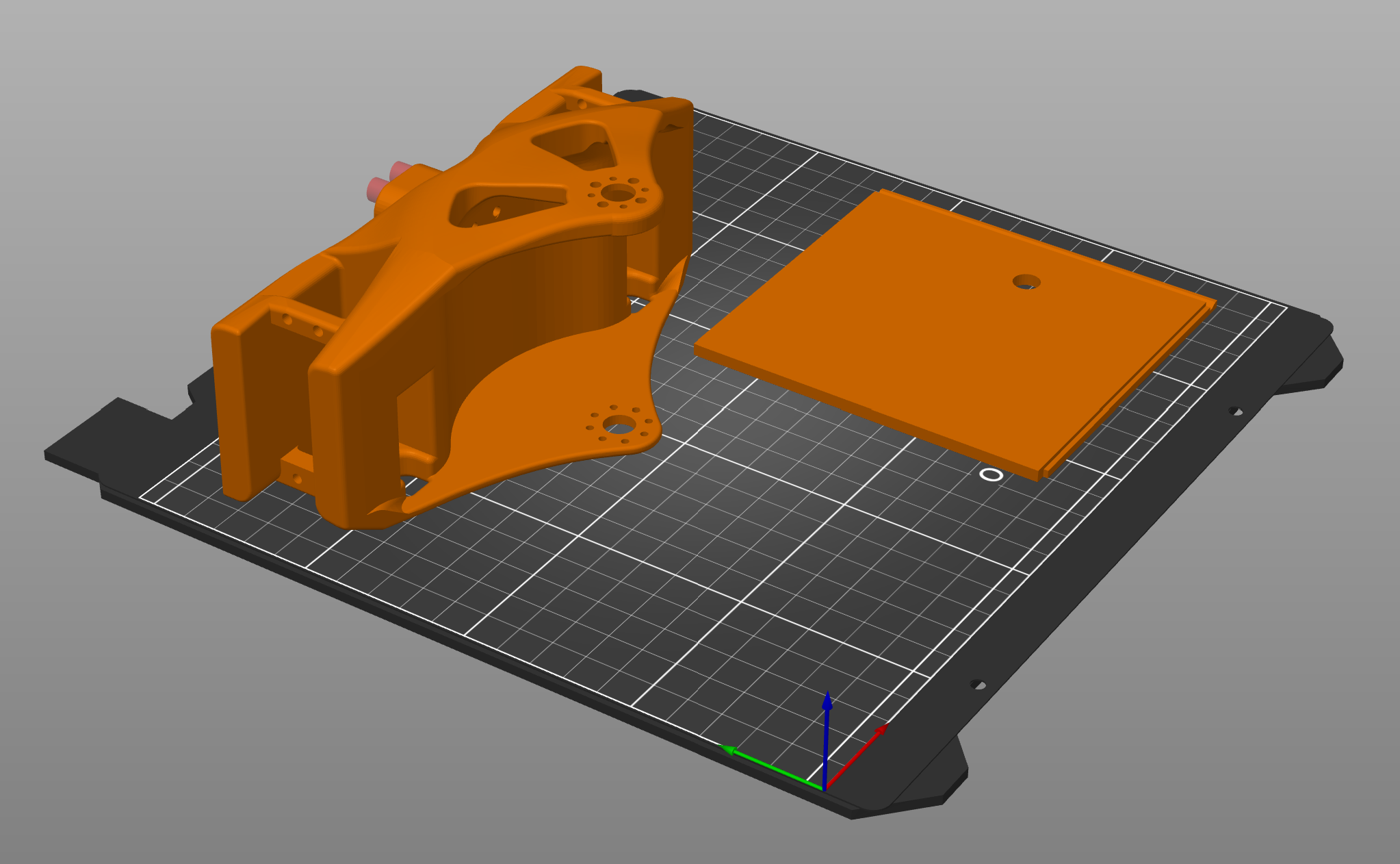
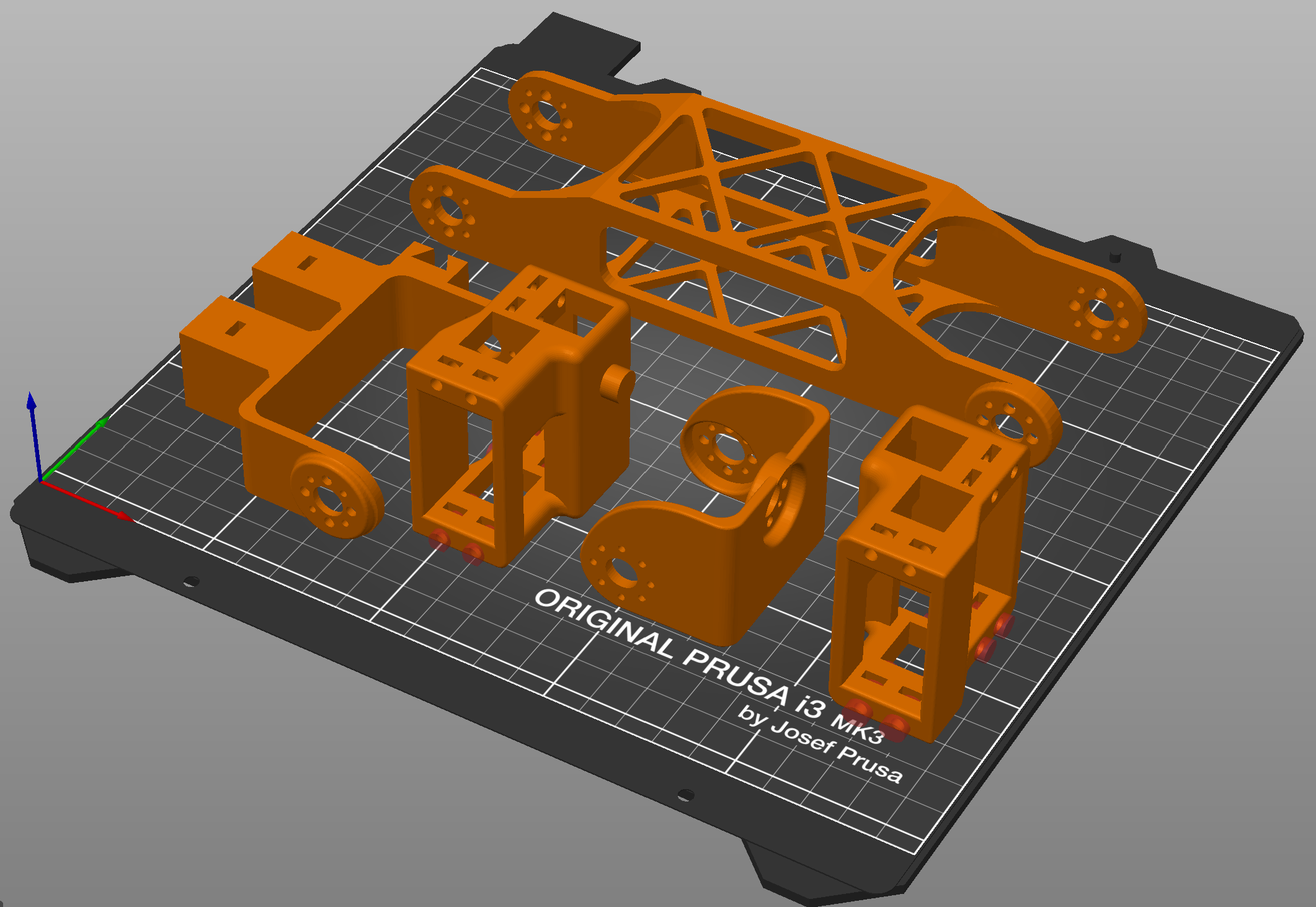
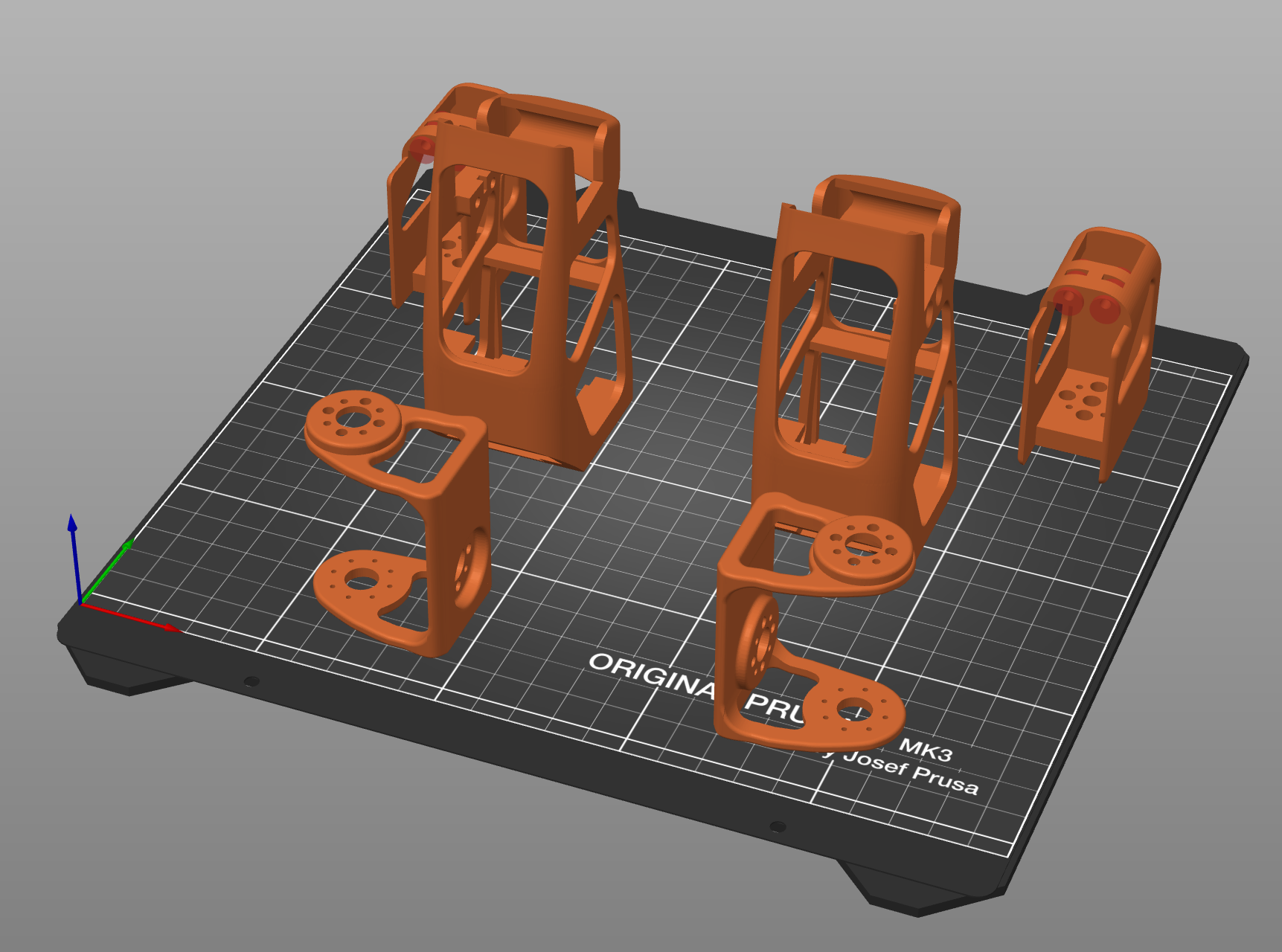
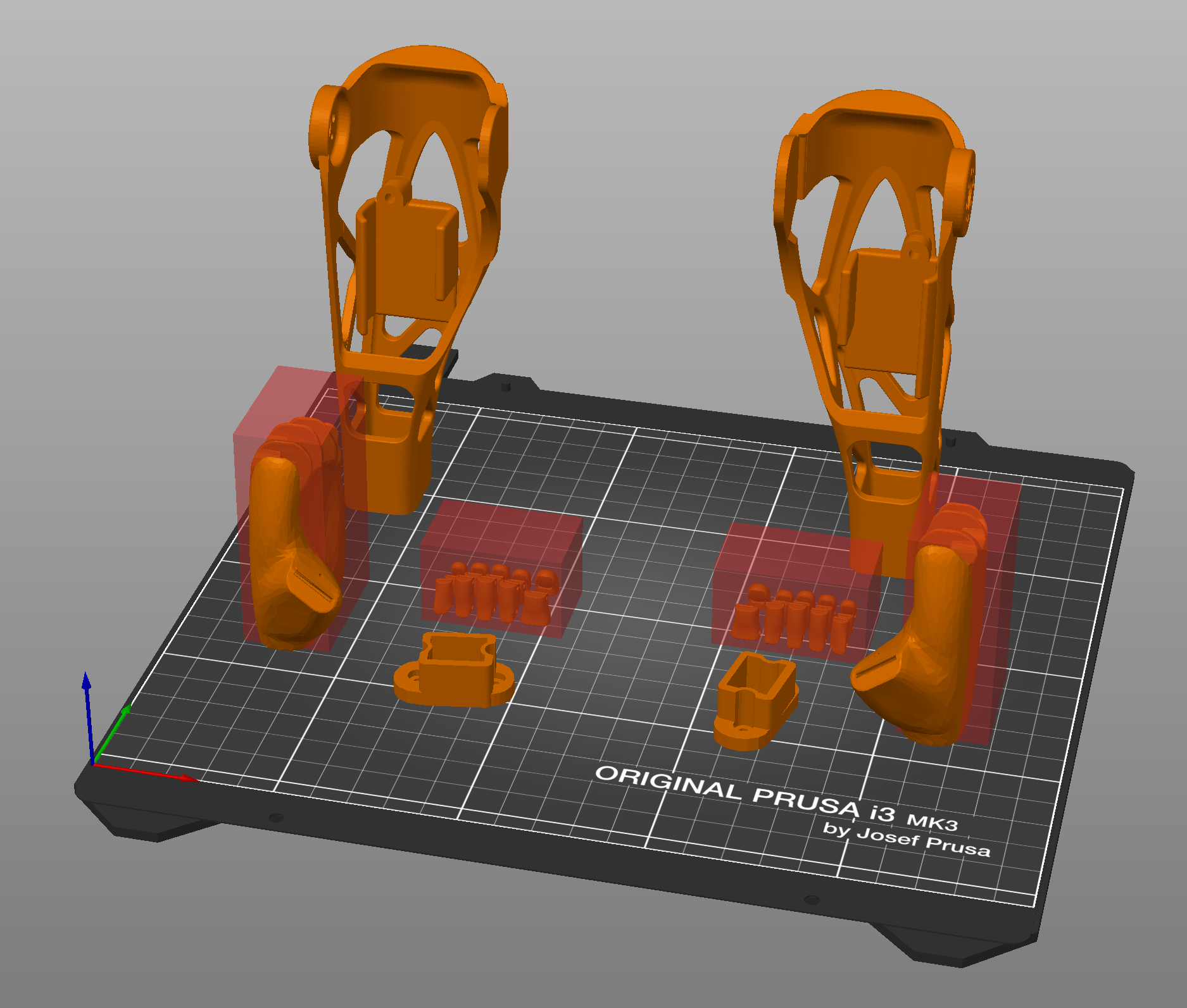
Print orientations are shown below for each part, along with the part names that are used throughout this documentation.
Headshell
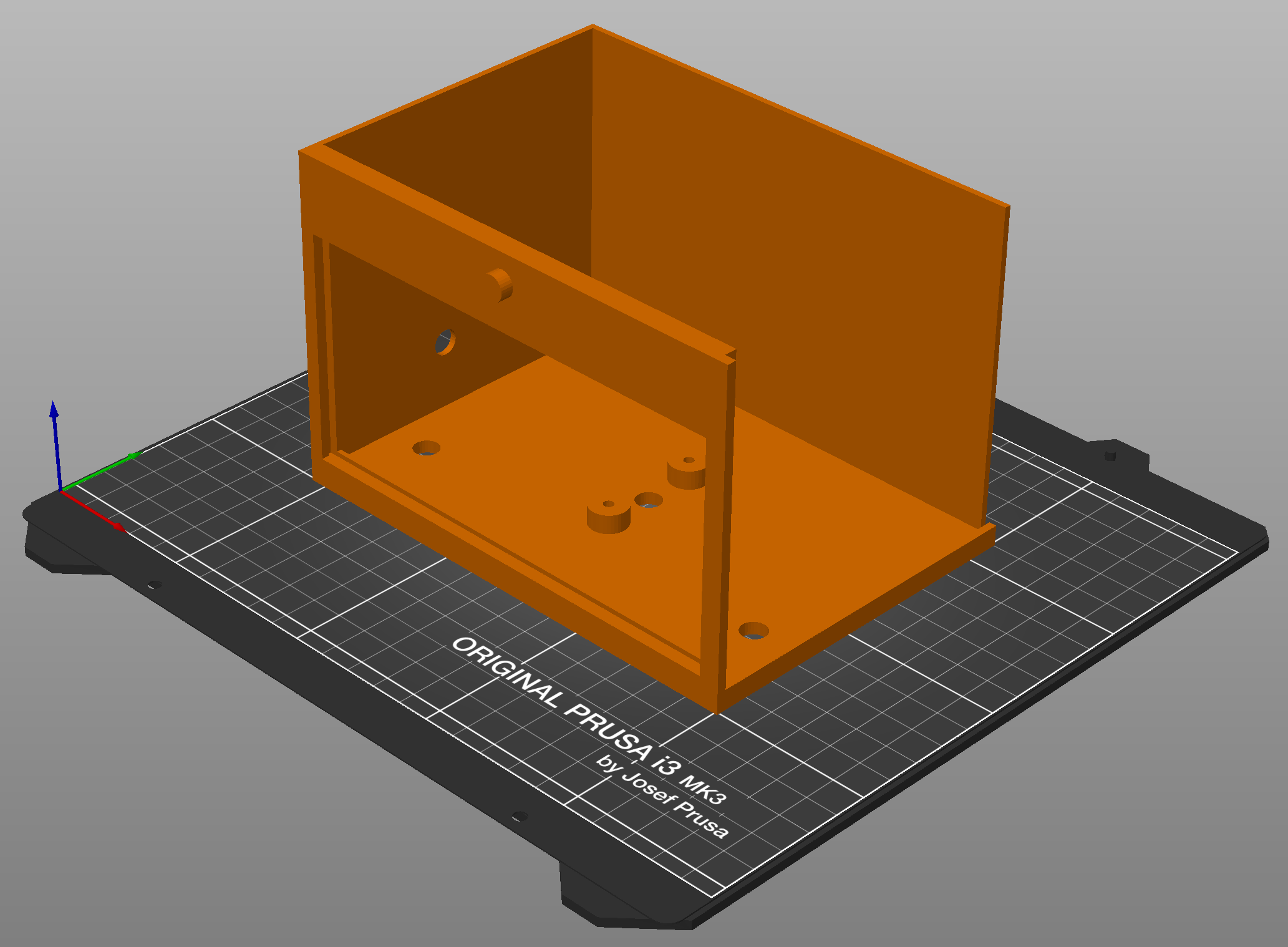
Chest and Headshell Panel
Head/Neck Connectors and Spine
Shoulders and Upper Arms
Hands and Lower Arms
Finger Hinges
Hips and Upper Legs
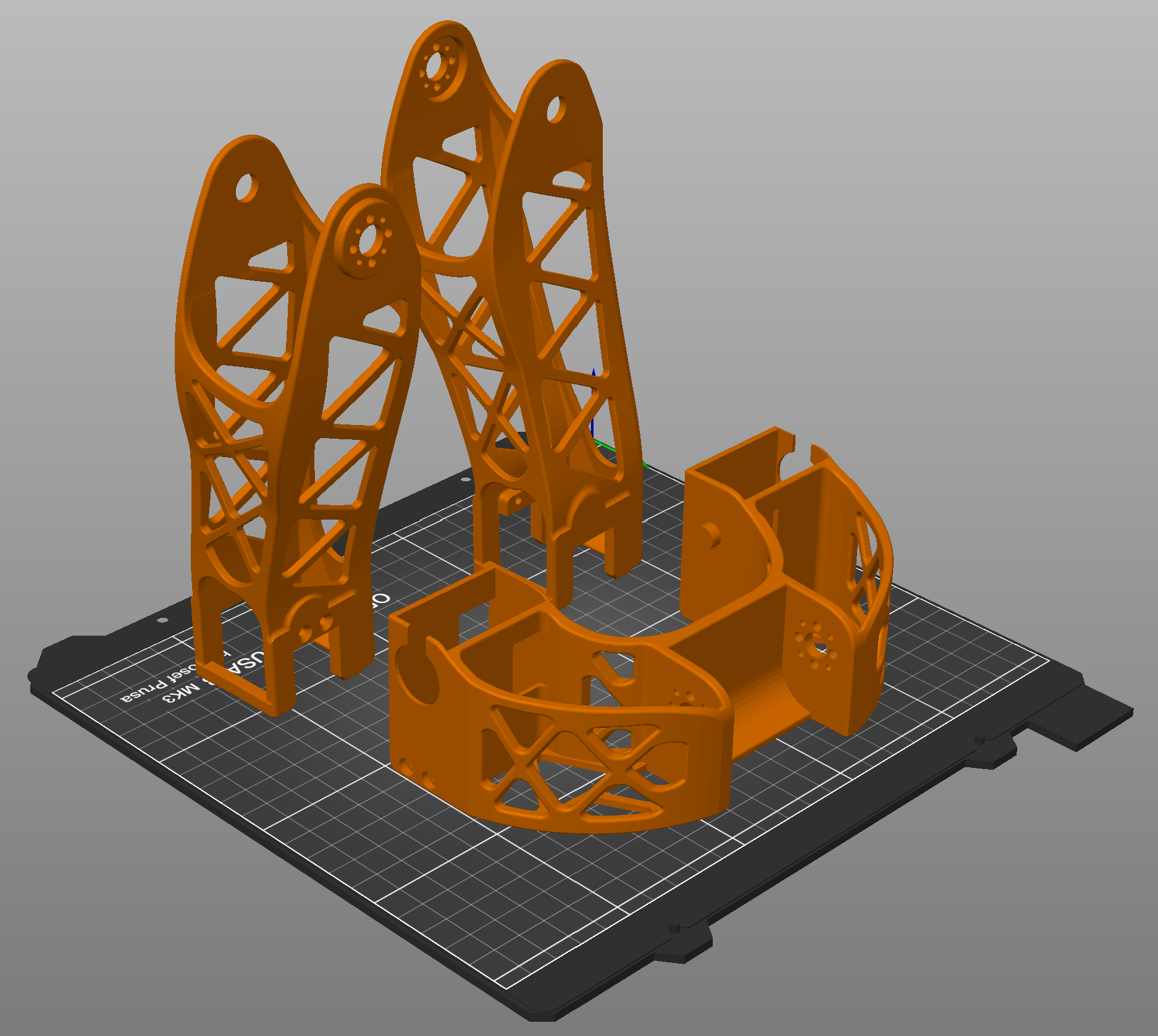
Lower Legs and Feet